
时间:2019-03-16 02:47:53
1、选择题 下列关于物体惯性的说法正确的是
A.静止物体有惯性,运动物体没有惯性
B.运动物体有惯性,静止物体没有惯性
C.物体不受外力时有惯性,受外力时没有惯性
D.物体在任何情况下都有惯性
2、实验题 (1)(6分)在“探究恒力做功与动能改变的关系”实验中(装置如图甲):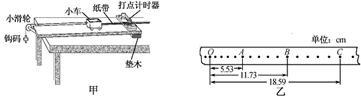
①下列说法哪一项是正确的?。(填选项前字母)
A.平衡摩擦力时必须将钩码通过细线挂在小车上
B.为减小系统误差,应使钩码质量远大于小车质量
C.实验时,应使小车靠近打点计时器由静止释放
②图乙是实验中获得的一条纸带的一部分,选取O、A、B、C计数点,已知打点计时器使用的交流电频率为50Hz,则打B点时小车的瞬时速度大小为?m/s(保留三位有效数字)。
(2)(12分)硅光电池在无光照射时不产生电能,可视为一电子元件。某实验小组设计如图甲电路,给硅光电池加反向电压(硅光电池负极接高电势点,正极接低电势点),探究其在无光照时的反向伏安特性。图中电压表V1量程选用3V,内阻为6.0 kΩ;电压表V2量程选用15V,内阻约为30 kΩ;R0为保护电阻;直流电源电动势约为12V,内阻不计。
①根据图甲,用笔画线代替导线,将图乙连接成完整电路。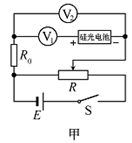
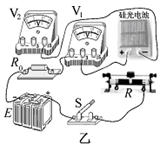
②用遮光罩罩住硅光电池,闭合开关S,调节变阻器R,读出电压表V1、V2的示数U1、U2。
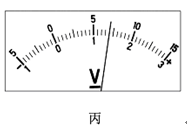
(i)某次测量时,电压表V1示数如图丙,则U1=?V,可算出通过硅光电池的反向电流大小为?mA(保留两位小数)。
(ii)该小组测出大量数据,筛选出下表所示的9组U1、U2数据,算出相应的硅光电池两端反向电压Ux和通过的反向电流Ix(图中“-”表示反向),并在坐标纸上建立Ix-Ux坐标系,标出了与表中前5组Ux、Ix数据对应的5个坐标点。请你标出余下的4个坐标点,并绘出Ix-Ux图线。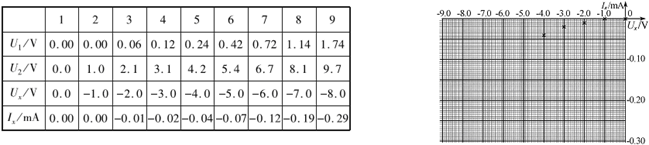
(iii)由Ix-Ux图线知,硅光电池无光照下加反向电压时,Ix与Ux成?(填“线性”或“非线性”)关系。
3、简答题 如图所示,一轻质弹簧竖直固定在地面上,上面连接一个质量m1=1.0kg的物体A,平衡时物体下表面距地面h1= 40cm,弹簧的弹性势能E0=0.50J。在距物体m1正上方高为h= 45cm处有一个质量m2=1.0kg的物体B自由下落后,与物体A碰撞并立即以相同的速度运动(两物体粘连在一起),当弹簧压缩量最大时,物体距地面的高度h2=6.55cm。g=10m/s2。
(1)已知弹簧的形变(拉伸或者压缩)量为x时的弹性势能 ,式中k为弹簧的劲度系数。求弹簧不受作用力时的自然长度l0;
,式中k为弹簧的劲度系数。求弹簧不受作用力时的自然长度l0;
(2)求两物体做简谐运动的振幅;
(3)求两物体运动到最高点时的弹性势能。
4、实验题 本小题包括A、B两小题,请在答题区域内作答。
A、(1)我们已经知道,物体的加速度(a)同时跟合外力(F)和质量(M)两个因素有关。要研究这三个物理量之间的定量关系的思想方法是?
A.理想实验法? B.等效替代法
C.控制变量法? D.建立物理模型法
(2)某同学的实验方案如图所示,她想用砂桶的重力表示小车受到的合外力F,为了减少这种做法而带来的实验误差,她先做了两方面的调整措施:
A、用小木块将长木板无滑轮的一端垫高,目的是?。
B、使砂桶的质量远小于小车的质量,目的是使拉小车的力近似等于??。
(3)实验中打出的其中一条纸带如图所示,求小车的加速度。
B、(1)对万有引力定律的表达式 ,下列说法正确的是?
,下列说法正确的是?
A.公式中G为常量,没有单位,是人为规定的
B.r趋向于零时,万有引力趋近于无穷大
C.两物体之间的万有引力总是大小相等,与m1、m2是否相等无关
D.?两个物体间的万有引力总是大小相等,方向相反的,是一对平衡力
(2)地球的半径为R,地球表面的重力加速度为g,万有引力常数为G,则第一宇宙速度为
?(用g、R表示);
(3)求卫星以第一宇宙速度环绕地球的周期(用g、R、G表示)。
5、实验题 在如图所示“研究平抛物体的运动”的实验中,采用以下方法:
(1)为使小球作平抛运动,必须调整斜槽末端的切线方向,其目的是________________________________.
(2)检验实验得到的轨迹是否准确的一种方法:从曲线上某点处画三段连续等长的水平直线,再在该水平线等间距处对应作三条竖直线与曲线交于三点,相应得到三段y轴方向的位移y1、y2、y3,如右图所示.若轨迹正确,则三段y轴位移之间应满足的关系是y3=_____________.