时间:2025-10-20 00:50:38
1、填空题 工业机器人手臂的设计中常用结构为:()、()
2、判断题 机电一体化技术的本质是将电子技术引入机械控制中,也就是利用传感器检测机械运动,将检测信息输入计算机,经计算得到的能够实现预期运动的控制信号,由此来控制执行装置。
3、单项选择题 工业机器人的手爪主要有钳爪式、磁吸式、气吸式三种。气吸式靠()把吸附头与物体压在一起,实现物体的抓取。
A.机械手指
B.电线圈产生的电磁力
C.大气压力
4、单项选择题 下面哪个国家被称为“机器人王国”?
A.中国
B.英国
C.日本
D.美国
5、判断题 1663年,日本的竹田近江利用钟表技术发明了自动机器玩偶,并在大阪的道顿堀演出。
6、判断题 谐波减速机的名称来源是因为刚轮齿圈上任一点的径向位移呈近似于余弦波形的变化。
7、填空题 设定为直角坐标系时,机器人控制点沿X、Y、Z轴()移动。
8、单项选择题 为了确保安全,用示教编程器手动运行机器人时,机器人的最高速度限制为()。
A.50mm/s
B.250mm/s
C.800mm/s
D.1600mm/s
9、判断题 轨迹插补运算是伴随着轨迹控制过程一步步完成的,而不是在得到示教点之后,一次完成,再提交给再现过程的。
10、单项选择题 工业机器人的额定负载是指在规定范围内()所能承受的最大负载允许值
A.手腕机械接口处
B.手臂
C.末端执行器
D.机座
11、问答题 机器人常用的机身和臂部的配置型式有哪些?
12、单项选择题 使用焊枪示教前,检查焊枪的均压装置是否良好,动作是否正常,同时对电极头的要求是()。
A.更换新的电极头
B.使用磨耗量大的电极头
C.新的或旧的都行
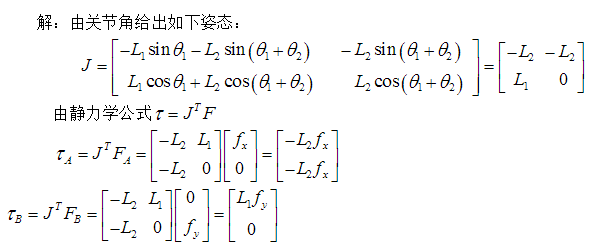
13、问答题 如图所示两自由度机械手在如图位置时(θ1=0,θ2=π/2),生成手爪力FA=[fx0]T或FB=[0fy]T。求对应的驱动力τA和τB。

14、填空题 舵机是一种()的驱动器,适用于()的控制系统。
15、单项选择题 下列那种机器人不是军用机器人。()
A.“红隼”无人机
B.美国的“大狗”机器人
C.索尼公司的A.IB.O机器狗
D.“土拨鼠”
16、填空题 机器人的坐标系的种类为:()坐标系、()坐标系、()坐标系、()坐标系、()坐标系。
17、单项选择题 测速发电机的输出信号为()。
A.模拟量
B.数字量
C.开关量
D.脉冲量
18、单项选择题 以下不属于航天器技术的是()。
A.载人飞船
B.人造卫星
C.航天飞机
D.火箭
19、填空题 机器人获取外界信息:相当于人的眼、耳、舌头和皮肤,可称之为()器官。
20、判断题 关节空间是由全部关节参数构成的。
21、问答题 机器人的基本组成部分有哪些?
22、单项选择题 用中子轰击铀核时出现原子核的裂变,并放出新的()现象,称核裂变反应
A.质子
B.轻子
C.中子
D.原子
23、单项选择题 示教编程器上安全开关握紧为ON,松开为OFF状态,作为进而追加的功能,当握紧力过大时,为()状态。
A.不变
B.ON
C.OFF
24、判断题 格林(格雷)码被大量用在相对光轴编码器中。
25、问答题 工业机器人对移动导轨的要求?
26、单项选择题 数字信号不随着时间连续变化信号,它是由()来表示。
A.“0”或“1”
B.模拟
C.数字
27、单项选择题 粘附剂与被粘附体间相溶性(),粘附界面的强度()。
A.越差;越牢固
B.越好;越差
C.越好;越牢固
D.越好;不变
28、多项选择题
机器视觉系统主要由三部分组成()。
A.图像的获取
B.图像恢复
C.图像增强
D.图像的处理和分析
E.输出或显示
F.图形绘制
29、单项选择题 使用机械的目的是省力、或加快速度(省时)、或操作方便(改变力的方向),使用机械绝对不能省功,也不会产生功,而只能()功和能。
A.传递或转换
B.增加
C.减少
30、判断题 手臂解有解的必要条件是串联关节链中的自由度数等于或小于6。